2024年5月13日至17日,IEEE国际机器人与自动化会议(International Conference on Robotics and Automation 2024,ICRA2024)在日本横滨国际平和会议场举行。该会议由IEEE机器人和自动化学会(RAS)主办,是机器人领域规模最大、影响最广泛的机器人学旗舰会议。

ICRA2024,日本横滨
本次ICRA2024会议吸引了全球7000余位学者参加会议,会议包含全体会、主题演讲、技术研讨会、机器人EXPO、海报展示、机器人竞赛等众多学术活动,覆盖了人形机器人、医疗机器人、人机交互、机器人学习、仿生机器人、3D重建、人工智能等机器人前沿领域,吸引了波士顿动力、KUKA、Franka Robotics、日本本田研究所、中国宇树科技等119家机器人企业参与展会。ICRA2024共收到来自58个国家的3937篇投稿,经过由28个编辑,588个副编辑和6719个审稿人的评审,其中1765篇被录用,录用率仅为44.83%。
必赢线路检测中心的李霄剑研究员、莫杭杰副研究员、肖夕林博士、方进博士、石毓东博士受邀参加了本次会议。团队2篇学术论文被录用,此外团队自主研发的人机协同腹腔镜扶持机器人系统也受邀参加了ICRA EXPO展览。
本次ICRA EXPO展览是ICRA会议首次推出的机器人展览环节,为研究者们提供现场演示机器人系统并进行讨论的机会,经申请遴选共有来自15个不同国家的81种机器人获得参展资格。合肥工业大学李霄剑研究员团队所展示的人机协同腹腔镜扶持机器人系统是一款面向微创手术的医疗机器人系统。该机器人能够在微创手术过程中代替辅助医生扶持腹腔镜,具备手术区域自主追踪、基于触力握把的柔顺拖动、创口点运动约束与自适应微调等创新功能,能够在手术过程中自主调整腔镜拍摄范围,为主刀医生提供持续稳定的手术视野。在该机器人展示过程中,百余位全球各国的机器人领域专家学者参观并体验了机器人的运行效果,给予了高度评价。

李霄剑研究员团队合影
人机协同腹腔镜扶持机器人系统在ICRA EXPO上展出



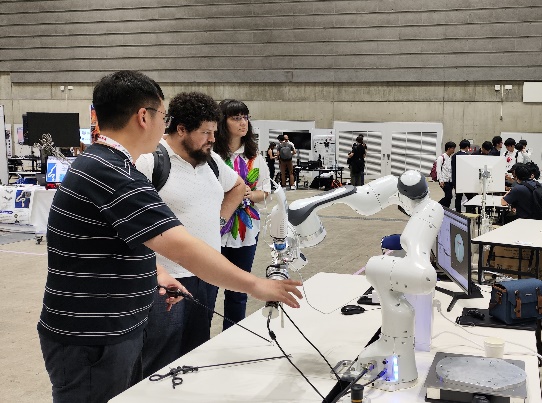
国内外专家学者体验人机协同腹腔镜扶持机器人系统
除了携机器人参展以外,李霄剑团队的肖夕林博士和方进博士还受邀进行了分组学术报告。管理科学与工程2019级博士肖夕林受邀在“Motion Control”主题学术报告会上对其参会论文“An Integrated Position-velocity-force Method for Safety-enhanced shared control in Robot-assisted Surgical Cutting”进行汇报。该论文提出了一种增强安全性的人机共享控制方法,通过运动融合机制实现人主导下人与机器人主控权的柔顺切换,并设计了一种力反馈机制以提高安全性。管理科学与工程2022级博士方进受邀在“Medical Robots”主题学术报告会上对其参会论文“A Force-driven and Vision-driven Hybrid Control Method of Autonomous Laparoscope-Holding Robot”进行汇报。该论文提出了一种面向腔镜扶持机器人系统的力觉和视觉混合控制方法,将视觉信息生成的虚拟力矩和触力握把获得的交互力矩进行融合,在远程运动中心约束下实现对腹腔镜视野的引导。两场汇报都受到了在场专家学者的高度关注,多名学者对报告进行了现场提问。
肖夕林和方进分别在学术报告会上进行汇报
国际机器人与自动化会议(ICRA)自1984年开始举办以来,至今已经举办了四十一届,是机器人和自动化领域的顶级国际学术会议,汇聚来自世界各地的研究者、工程师和科学家,共同探讨最新的研究成果和技术进展,始终引领着机器人前沿领域的发展。
(莫杭杰/文 综合/图 李霄剑/审核)
